“每天反复做的事情造就了我们。”在日常生活中,个体需要根据外界环境、内部状态、过往经验和行为结果,持续决定选择什么动作、何时以及如何执行动作,并根据结果不断更新未来的行为策略,从而获取奖励、避免伤害并适应动态环境。这些过程依赖于大脑对感觉信息、动机状态、时间结构、动作价值和行为后果的整合计算。基底神经节及其相关环路在动作选择、运动控制、强化学习和适应性决策中发挥核心作用,其功能异常广泛见于帕金森病、亨廷顿舞蹈病、强迫症、抑郁和成瘾等神经精神疾病。
我们实验室致力于解析大脑如何选择、执行和强化行为的神经环路机制与计算原理。在传统环路神经科学研究基础上,我们进一步结合强化学习理论、定量行为分析、机器学习解码和脑状态建模,探索基底神经节相关环路如何表征不同的动作状态、动机状态和学习状态,并进一步发展基于脑状态解码的闭环脑机接口和神经调控策略。实验室的长期目标是将基础神经环路机制、人工智能算法和脑机接口技术相结合,为运动、动机和精神障碍的精准干预提供新的理论基础和技术路径。
在此框架下,我们选择具有相对高级认知灵活性和学习能力、并适于观测和操纵特定神经元类型/环路的小鼠作为研究对象,建立了全脑尺度电生理记录、宽场钙成像等研究系统,发展了多种定量行为学范式(包括多层级抉择、虚拟现实、时间认知和强化学习等),并结合人工神经网络建模方法,系统解析复杂行为背后的神经环路机制与计算原理。我们的研究成果已发表于Cell (2020; 2021)、Nature Neuroscience (2026a; 2026b)等国际顶级期刊,处于国际前沿。我们综合运用遗传学定义的环路解析、在体神经活动记录、神经递质信号成像、精细行为学分析、计算建模和机器学习解码等方法,重点回答以下三个不同而又相互关联的问题。
(1)动作选择与决策
个体需要在复杂环境中选择合适的行为,同时抑制竞争性或不适当的行为。例如,开车时看到绿灯通常需要前行,但如果前方出现行人,则需要立即停止。那么,大脑如何选择期望被执行的动作,并抑制不希望被执行的动作?在成本-收益冲突、风险、不确定性和动机冲突条件下,大脑如何计算动作价值并作出适应性选择?
(2)动作执行与运动控制
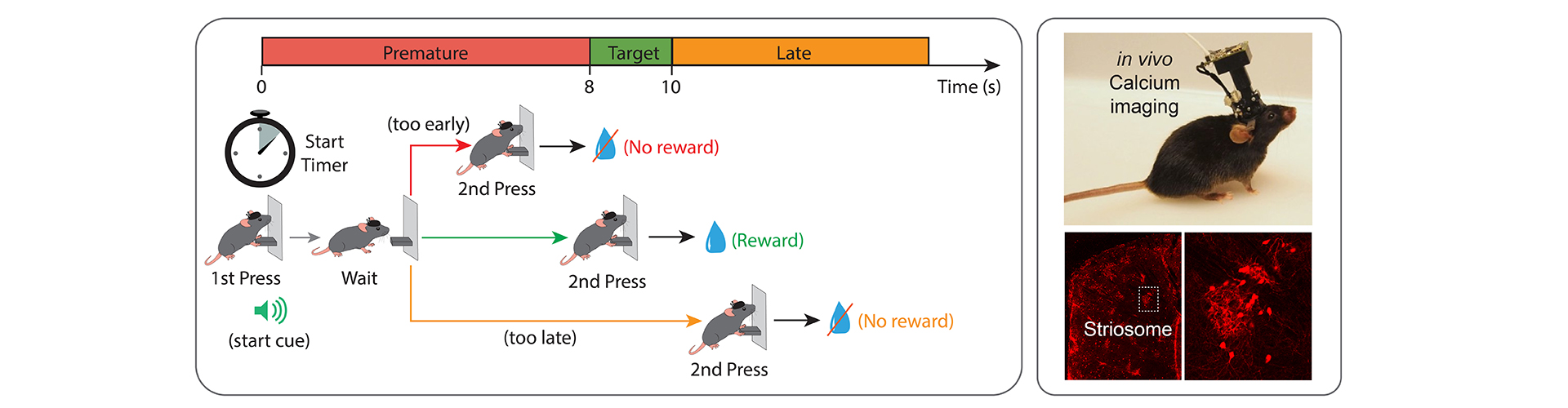
适应性行为不仅需要选择正确的动作,也需要以合适的时间、强度、速度和协调方式执行动作。吃饭、喝水、行走和交流等日常行为都依赖于一系列动作的连续而精细的控制。那么,大脑如何调节运动参数,例如动作动力、速度和精度?如何控制运动起始和动作序列?如何实现连续动作的协调执行?如何基于运动控制原理开发和优化脑机接口和闭环神经调控策略?(相关工作见 Deng & Xiao et al., Cell, 2021; Tang et al., Nat. Neurosci., 2026)
(3)动作强化与适应性学习
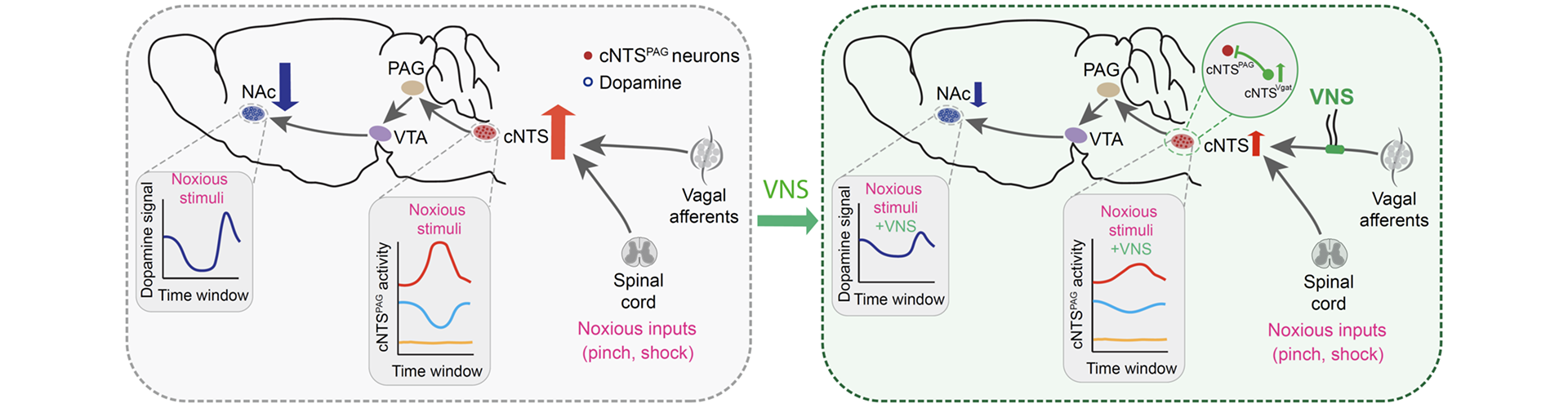
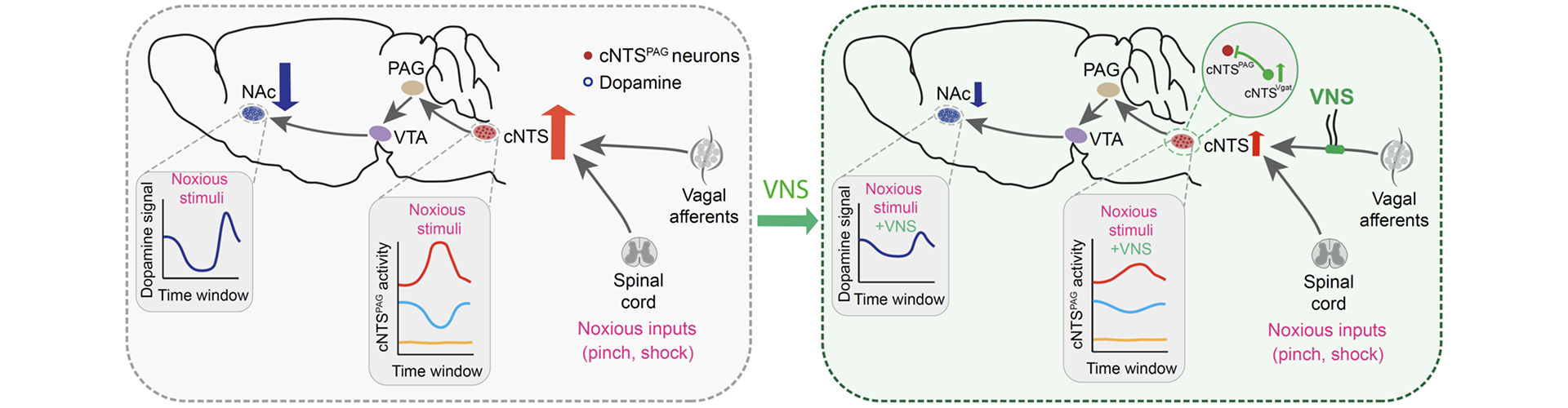
个体需要从与环境的交互中学习不同行为所产生的结果,从而强化有利动作、抑制有害或无效动作。基底神经节-多巴胺系统如何支持正向和负向学习、如何与其他神经调质系统协同调控行为更新?单胺类和胆碱能神经调质系统如何调节学习、显著性加工和行为价值更新,以及内部状态如何改变大脑中的学习算法?如何利用生物智能实现适应性学习的基本原理为人工智能算法和智能神经调控系统提供神经科学启发?(相关工作见 Xiao et al., Cell, 2020; Chen et al., Nat. Neurosci., 2026)
总体而言,我们的研究试图在神经环路机制、计算原理、人工智能和脑机接口技术之间建立桥梁。通过解析动作相关脑状态的编码、解码和调控机制,我们希望为运动和精神障碍的闭环神经调控提供新的理论框架和技术基础。

研究组组长;研究员